For future reference, here’s a tridiagonal solver in vex (very much not optimised, but it’s based on some Mathematica code) @jake rice 😮
“` #include
function complex cdiv(complex a, b) { complex conjB = conj(b); complex num = cmult(a, conjB); complex den = cmult(b, conjB); complex ans = cmult(num, CMPLX(1.0/den.real, 0)); return ans; }
function complex[] TDMAsolver(complex a[], b[], c[], d[]) { int nf = len(d); // number of equations complex p[]; complex q[]; for (int i=0;i
Category: cgi-math
Archived post by SniperJake945
I donno how many people here have every tried converting to and from barycentric coordinates, but assuming you can project your triangle so that all points lie on the x and y axis (this is easy peasy with dihedral), this is my favorite method of finding where a point is within a triangle:
“`c //pts is the three points in your triangle matrix3 gen_bary_mat(vector pts[]){ matrix3 m = set( pts[0].x, pts[0].y, 1, pts[1].x, pts[1].y, 1, pts[2].x, pts[2].y, 1); return m; } vector tri_pts[] = array({10, 4, 1}, {3,2,1}, {0, 10, 1}); vector test_pt = {6, 5, 1}; matrix3 bary_matrix = gen_bary_mat(tri_pts); vector bary_pt = test_pt * invert(bary_matrix); //solution by inversion, this is big brain printf(“bary coords: %g \n”, bary_pt); “`
this means u can pre-compute the transformation needed to project a point into bary coords
which is realllllllllllllllllllllllllllllllllllly fuckin nice if u need to do that a bunch
this also extends to tets as well, but it’d be a 4×4 matrix instead of a 3×3
it helps if everything is actually aligned to the z-1 axis, so if z is set to 1, then you can invert the solution as well to convert back to cartesian coordinates
i like to do my triangle projection with dihedral so u don’t have to worry about any kind of scaling being applied to the triangle, like so:
“`c //this would gooooooooooooo in a prim wrangle, and then ud call the resulting trs matrix in a point wrangle to apply the positional changes //big brain matrix3 m = dihedral(v@N, set(0,0,1)); matrix trs = m; matrix mov_to_orig = ident(); matrix mov_z = ident();
translate(mov_to_orig, v@P); translate(mov_z, set(0,0,1));
trs = invert(mov_to_orig) * m * mov_z; “`
iono how useful this is, but ive had to do this kind of stuff a lot on one of the projects im working on
so i thought id share it
en.wikipedia.org/wiki/Barycentric_coordinate_system#Conversion_between_barycentric_and_Cartesian_coordinates the matrix form comes from the bottom of this section. solution by inversion is just the easiest way of solving that system in houdini currently. especially since it’s a 3×3
Archived post by TOADSTORM
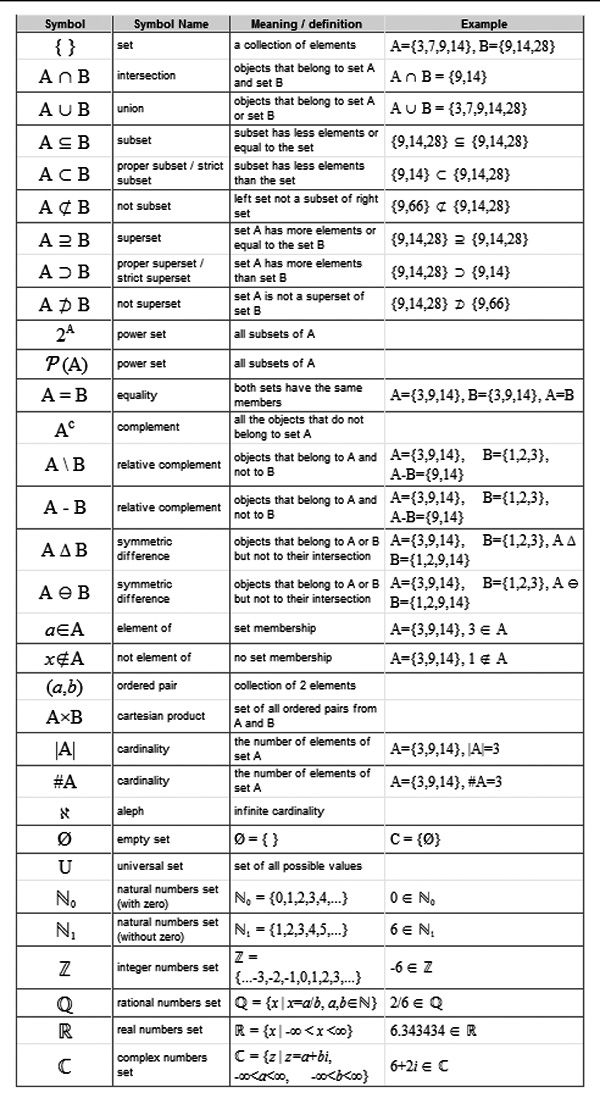
it’s hard to find a single sheet that covers every area of math
i found this one that has most of what i’ve seen on whitepapers
there’s also this one for set theory
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20193609/27/19/04bb3acb0e7fa71fb47b168431c97b02.jpg
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20193609/27/19/113d4693d4edf453430927b4558f6640.jpg
{kind=link}
{kind=link}
Archived post by Yon
you can hit randomize and get vector fields to implement in hou all day
Archived post by mr5iveThou5and
Archived post by eetu
Archived post by jake rice
school.geometryprocessing.org/ lots of great talks are up for free on this site
😮
Archived post by bhenriksson
Archived post by jake rice
fun hot tip, inside your $HFS/ocl/compute folder, the team at sesi has included both a simple sparse matrix vector multiplication function as well as a bunch of opencl vector functions, including parallel reduction for large dot product operations 😮
definitely worth taking a look at
Archived post by jake rice
cs.brown.edu/courses/cs053/current/lectures.htm a series of math lectures on linear algebra where the homework is to write a matrix library from scratch in python!!!! pretty cool if you’re interested in understanding the theory and implementation of this stuff