So there is a “trick” / non-obvious way to generate collision shapes for ragdolls now that does not require you to sit and click for hours manually
this thing is for kinefx (not crowds) but….
make sure you have a rest transform on the skeleton going in and unpacked geo in the 3rd input
you can add the shapes into the crowd setup as a new agent layer, like any other skin
call it collision, but don’t display it
and in your collision layer you reference “itself” basically the existing collision layer shapes
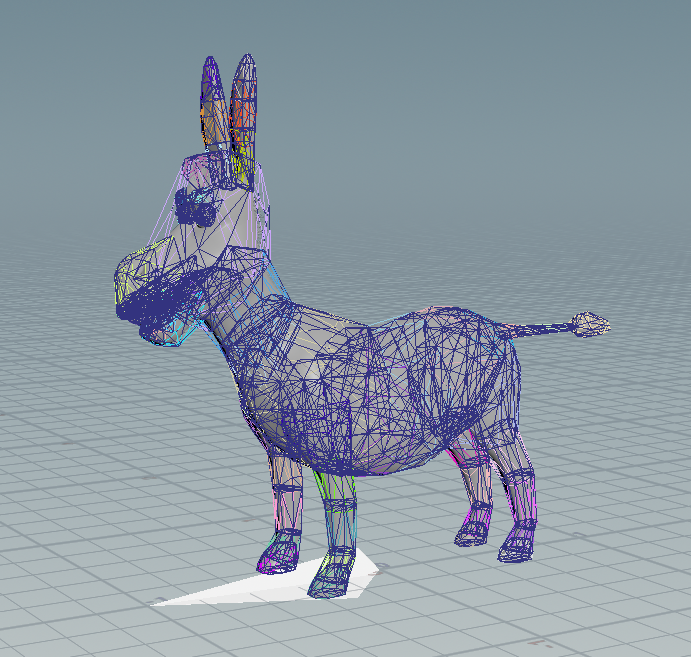
and because its generated from the skeleton, all the names etc match
that way, this is what the kinefx tool generates
and the agent collision layer adopts it nicely
saves you a few hours of raging at the terrible UI while you try to align pill shaped…. %$@!
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20245904/12/24/CrowdVellum-v06.mp4
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20245904/12/24/image.png
{kind=link}
{kind=link}