it’s a good trick to know – especially for complex camera moves. You can do two or three different camera rigs, with full keyframed animation, then create a blend cam and use CHOPS to blend between their transforms and stitch them together
@flight404
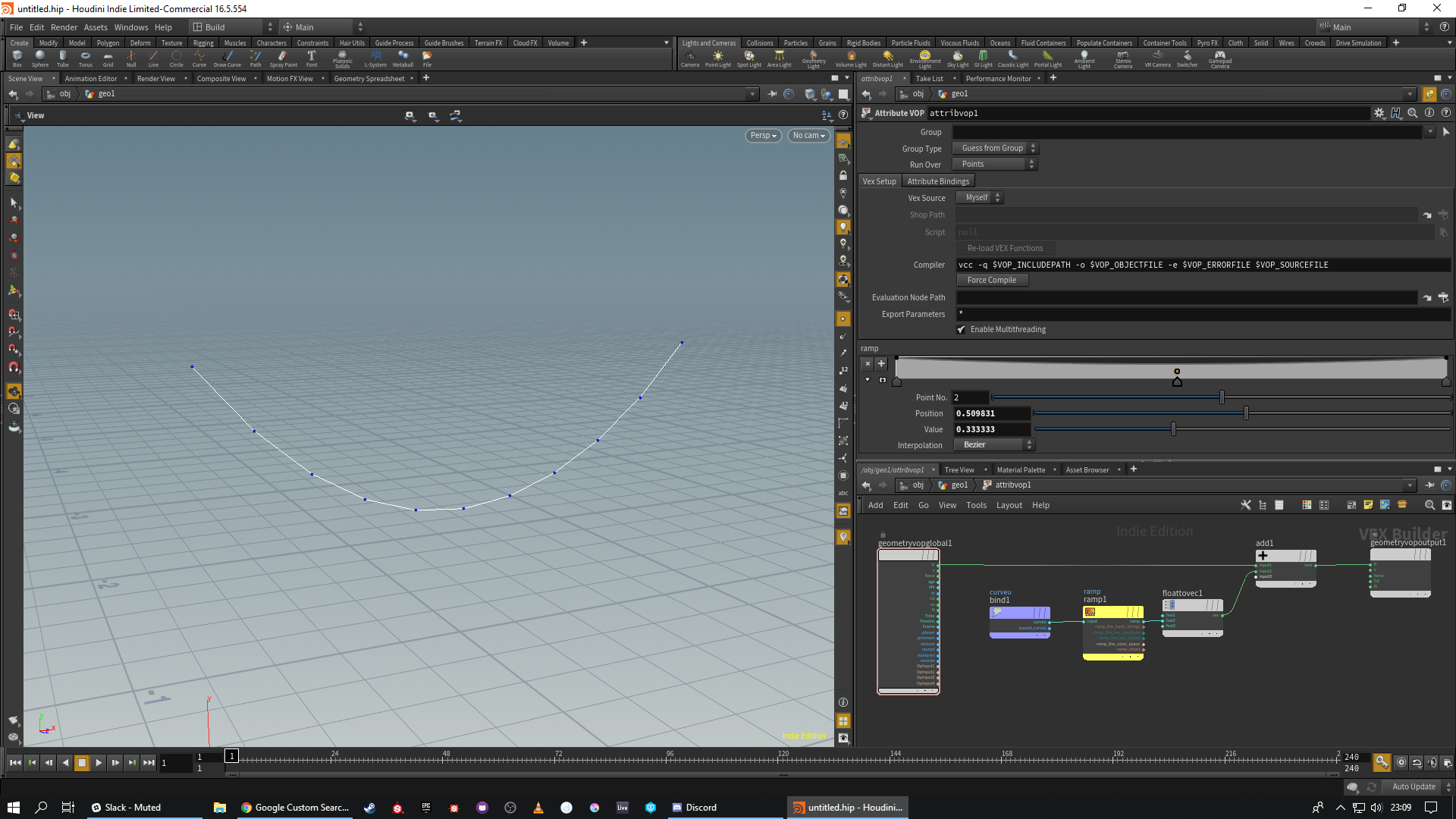
Ignore the filename, I just iterated the last file. Cam5 in here is my generailzed keyframe camera rig
I break all the transforms down to individual nodes and parent everything to a null that essentially acts as my look-at. The only camera property I animated (I didn’t in this file) is the z translation of the camera.
there are a bunch of offsets for adding post effects, and it is a hybrid of euler rotations and look-at’s, so you can work with either.
I love this setup for doing things like rotation around objects and keeping a good focus on something
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20185709/18/18/chops_cam_for_robert_02.hip
{kind=link}
{kind=link}
{kind=link}