Quick thread for Installing ASWF OpenVDB in Houdini for Windows 11
Category: hou-programming
Archived post by mysterypancake
i put some info about worksets in this section github.com/MysteryPancake/Houdini-OpenCL?tab=readme-ov-file#worksets
the vellum thing above also uses worksets/graph color
there’s a few things that can be changed before running the kernel one is the number of workitems by using worksets as Jake said “`cpp // In VEX, runs the kernel 1 time with at least 6 workitems i[]@offsets = {0}; // this doesn’t affect any IDs but it gets passed as a kernel argument I[]@sizes = {6}; “` “`cpp // In OpenCL, the offset and size is passed from the VEX array // Note get_global_id(0) still starts at 0 even with multiple worksets kernel void kernelName( int color_offset, // offset number from i[]@offsets int color_size, // size number from i[]@sizes (not rounded up) … ) { … } “` the other is the [local workgroup size](github.com/MysteryPancake/Houdini-OpenCL?tab=readme-ov-file#changing-the-local-workgroup-size) “`cpp // Force the local workgroup size to 48 __attribute__((reqd_work_group_size(48, 1, 1))) @KERNEL { // This should print “Local size = 48” printf(“Local size = %d”, get_local_size(0)); } “`
The number of workitems it gives you always rounds up based on the local workgroup size
so if you did `i@[]sizes = {4}` but `get_local_size(0)` was 12, it gives you 12 workitems instead
this usually leads to [extra workitems you need to skip over](github.com/MysteryPancake/Houdini-OpenCL?tab=readme-ov-file#bounds-checking)
Archived post by mattiasmalmer
got it to work! thanx.
it is my own version of something like the wrinkle deformer.
(I intend to use it for post solve editing of cloth sims.)
i made this as a wrangle thing first but it was slow so i caved and made it in openCL. makes ALL the difference.
the stock wrinkle deformer does things im not entirely happy with so i had to make my own. also learning moment.
here is a hip if you want to play around
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20260503/24/26/houdini_eFFYhuo5Xh.mp4
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20260503/24/26/image.png
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20260503/24/26/constraint_solver_Mwrinkle.hiplc
{kind=link}
Archived post by igor.elovikov
i usually do this:
“`py HOU_SEVERITY_MAP = { logging.DEBUG: hou.severityType.Message, logging.INFO: hou.severityType.ImportantMessage, logging.WARNING: hou.severityType.Warning, logging.ERROR: hou.severityType.Error, logging.CRITICAL: hou.severityType.Fatal, }
class HouLogHandler(logging.StreamHandler): def __init__(self): super().__init__(self)
def emit(self, record: logging.LogRecord): hlog_entry = hou.logging.LogEntry( record.msg, source=record.name, severity=HOU_SEVERITY_MAP[record.levelno], ) hou.logging.log(hlog_entry) “`
now i can connect this handler to builtin logging:
“`py import logging
logger = logging.getLogger(“GLTF Exporter”) logger.handlers = [HouLogHandler()] # or adding handler to default stdout if i’m headless logger.setLevel(logging.DEBUG)
logger.info(“GLTF Exporter imported”) “`
Archived post by animatrix2k7
I am just used to from-to-action syntax as used in many graphics libraries.
Those were brutal but I am glad SESI put the coloring method I sent them into the docs back in the day.
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20252110/07/25/image.png
{kind=link}
Archived post by toadstorm
okay. i’m gonna eventually make a bloggopost about this but i’ve learned a few things about getting these shitty ass python state handles to work in the correct local space i want
the two main things i found are: * use `cache_previous_parms` to compute *deltas* and then add the delta value to the modified parm in onHandleToState rather than trying to set absolute values for parms in most cases * use `pivot_comp_t[xyz]` and `pivot_comp_r[xyz]` to establish the actual pivot for your handle so that you can properly transform in local space, especially if you are using a control that only exposes specific rotation axes
so as an example in onStateToHandle, where you need to basically set up the handle’s transform based on what’s going on under the hood / in the parameters window:
“`python elif handle == self._handles[“GUIDE_COLUMN”].name(): # set position of handle pivot = self._skeletonCache.point(1).attribValue(“P”) parms[“pivot_comp_tx”] = pivot[0] parms[“pivot_comp_ty”] = pivot[1] parms[“pivot_comp_tz”] = pivot[2] # set rotation prerot = self._skeletonCache.point(2).attribValue(“transform”) prerot_m = hou.Matrix3(prerot) prerot = prerot_m.extractRotates(rotate_order=”xyz”) parms[“xyz_order”] = “xyz” parms[“pivot_comp_rx”] = prerot[0] parms[“pivot_comp_ry”] = prerot[1] parms[“pivot_comp_rz”] = prerot[2] “`
the skeletonCache is a frozen reference to the skeleton geometry that’s being transformed that exists as a member of the state class, that’s so i can have a frame of reference for how the handles need to be oriented. the cache is updated onEndHandleToState
the equivalent code in onHandleToState: “`python elif handle == self._handles[“GUIDE_COLUMN”].name(): # rotate only # self.log(prev_parms) prevrot = hou.Vector3(prev_parms[“rx”], prev_parms[“ry”], prev_parms[“rz”]) rot = hou.Vector3(parms[“rx”], parms[“ry”], parms[“rz”]) delta = rot – prevrot current = node.evalParm(“crane_yaw”) self.log(“rot: {}”.format(rot)) self.log(“prev: {}”.format(prevrot)) # self.log(“delta: {}”.format(delta)) node.parm(“crane_yaw”).set(current + delta[2]) “`
so this way as long as the starting orientation is correct, as long as the user is dragging a handle it’s just computing the difference between prev and current, adding that to the handle, and then basically forgetting about it and resetting the handle’s position and orientation onStateToHandle, the next time the handle is activated
oh and in OnHandleToState i’m making sure that this shit only runs if `ui_event.reason() == hou.uiEventReason.Active`, because the prev_parms dict is always zero when you first activate the handle, which would make my delta calculation all fucked up when the user first grabs the handle (meaning `ui_event.reason()` == `hou.uiEventReason.Start`)
i knew it was going to be a lot of boilerplate but this amount of it feels pretty insane. dunno if there’s an easier way i’m missing but this at least works
Archived post by niconghiem
just a heads up there are some ‘theoretical’ guarantees that are not there so it might trip in some extreme cases (probably when the query point is far from the quad)
if I have time I’ll try to find out something I read in a paper the other day that had a more sane approach for this
but I need to find which paper lmao
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20255308/10/25/pointquaddist.hiplc
Archived post by mysterypancake
a bit ago i remade primuv() in opencl, and today I remade xyzdist() too. in case it helps anyone: github.com/MysteryPancake/Houdini-Fun/blob/main/Primuv_Xyzdist.md
xyzdist() requires a primnum unlike the regular version. it returns the nearest surface position and uvw coords the primnum can be grabbed from a point cloud or something else supporting BVH acceleration
Archived post by mattiasmalmer
one step forward two steps back kindof algo 🙂
nice enough result so i will hold on to it.
now back to doing the thing i was actually trying to get done…
i did not like the arbitrariness so I made a better one myself…
“` vector poslist[]; Attachments in this post:
vector p0=point(0,”P”,pts[0]); vector p1=point(0,”P”,pts[1]); vector p2=point(0,”P”,pts[2]);
vector n = normalize(p1 – p0); vector v = p2 – (p0+p1)*.5; vector proj = dot(v, n) * n; vector g = p2 – 2* proj;
append(poslist,g);
for (int i=0; i
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20252006/20/25/houdini_upLMp3SOem.mp4
Archived post by ogvfx
(discord.com/channels/270023348623376395/881711343567269909/1358875336498217222) Referring from this topic here
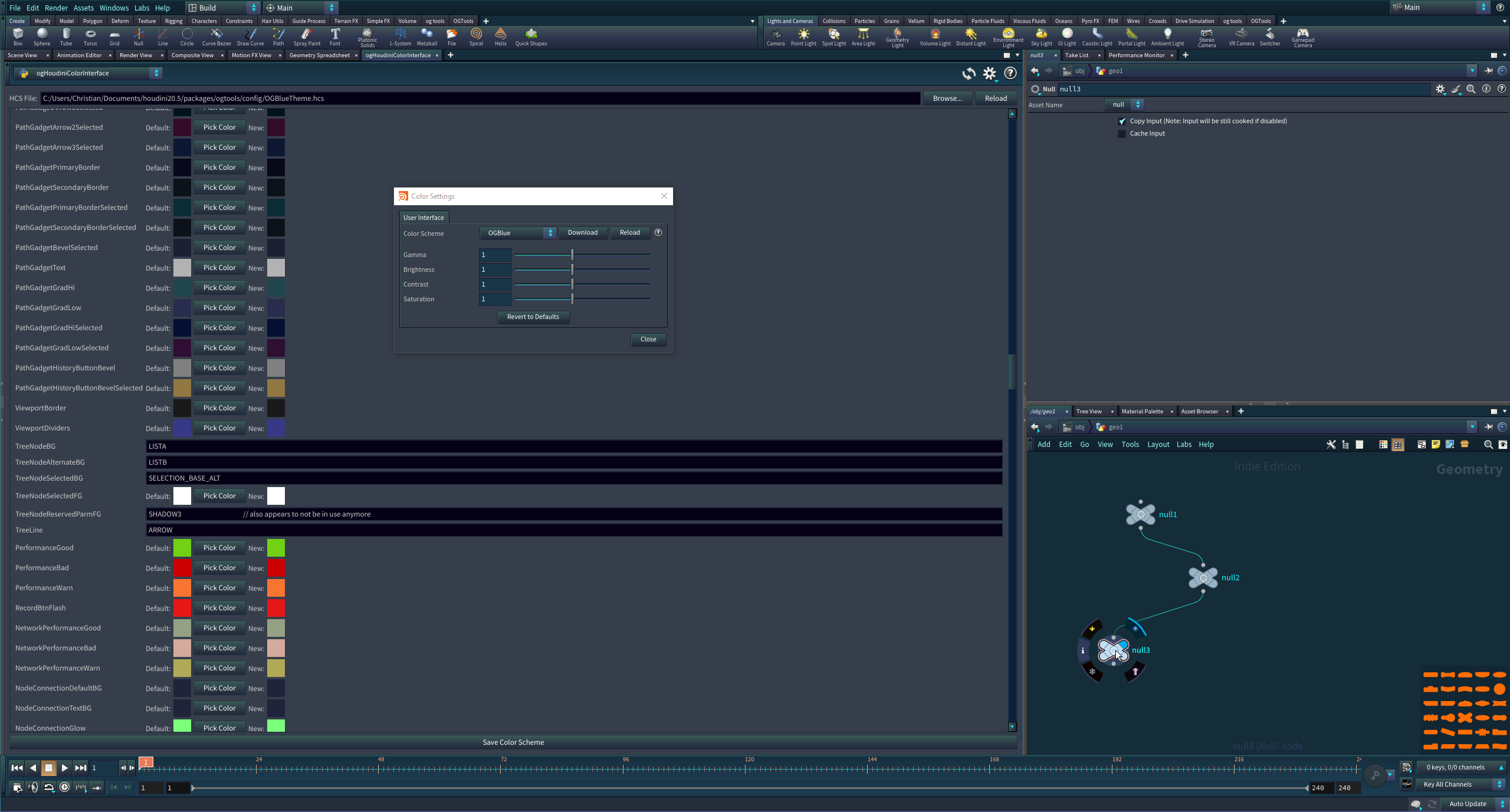
For anyone interested in making your own ui color in Houdini I made a python panel that will load a hcs file so you can pick colors and then all you need to do is reload the color theme in Houdini, and here’s my blue theme I shared a screen shot of in.#hou-usd It should show up if you put this in your houdini documents folder / config. There’s some parts of the ui I still want to fix. This is just some insanity stuff I’m doing while trying to find work.
Attachments in this post:
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20251904/08/25/ogHouUIColor.pypanel
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20251904/08/25/OGBlueTheme.hcs
http://fx-td.com/houdiniandchill/wp-content/uploads/discord/20251904/08/25/houdini_5Ai2HaeYOU.png
{kind=link}